
1
S100 RTK RECEIVER
USER GUIDE
Version 1.21
November 21, 2021
https://www.polaris-gnss.com
2
Table of Contents
Table of Contents .................................................................................................... 2
1 Overview ............................................................................................................. 4
1-1 Introduction ..................................................................................................... 4
1-2 RTK Operation Guideline ................................................................................. 4
1-3 S100 RTK Receiver Features ............................................................................. 5
2 USB Interface ....................................................................................................... 6
3 Preparing for First-Time Use ................................................................................. 7
3-1 Install “Polaris Connect” App ........................................................................... 7
3-2 Install USB Driver ............................................................................................. 7
3-3 Check S100 Receives Satellite Signal ............................................................... 7
4 RTK Rover Operation ........................................................................................... 10
4-1 Bluetooth RTK Rover to Work with App-Built-In NTRIP Client ...................... 11
4-2 Bluetooth Rover to Work with Third-party NTRIP Client App ....................... 12
4-3 USB Rover....................................................................................................... 14
5 Raw Measurement Recording and Post Processing ............................................. 16
5-1 Preparing for PPK ........................................................................................... 16
5-2 Preparing for PPP ........................................................................................... 18
5-3 Obtaining Log Data from S100 ....................................................................... 19
6 Software and Firmware Update .......................................................................... 24
6-1 S100 Viewer Software Update ....................................................................... 24
6-2 S100 RTK Receiver Firmware Update ............................................................ 25
6-3 S100 Bluetooth Module Firmware Update .................................................... 28
7 Troubleshooting .................................................................................................. 30
Appendix ............................................................................................................... 33
A-1 More Usage Scenarios ................................................................................... 33
A-1-1 Base-Rover RTK with PPP-Corrected Base ......................................... 33
A-1-2 PPK with PPP-Derived Base ................................................................ 35
A-2 Other RTK Related Operations ...................................................................... 36
A-2-1 Bluetooth RTK Base with App-Built-in NTRIP Server .......................... 37
A-2-2 USB RTK Base ...................................................................................... 39
A-2-3 Setting Up NTRIP Caster ..................................................................... 41
A-2-4 Third-Party NTRIP Client App Operations .......................................... 43
A-3 Configure RTK License (for S100 Purchased After 2021.09.01) ..................... 49
4
1 Overview
1-1 Introduction
S100 is a high performance dual-frequency RTK receiver with Bluetooth and USB interface. It offers
centimeter-level positioning accuracy suitable for surveying, mapping, and GIS data collection.
By default, S100 is shipped as RTK rover to accept RTCM3.x message or SkyTraq carrier phase raw
measurement data from an RTK base, and provides centimeter-level accurate position result relative to
the RTK base in standard NMEA message format.
S100 can also be configured as a RTK base to provide RTCM3.x message or SkyTraq carrier phase raw
measurement output.
S100 has two major interfaces for different applications: USB and Bluetooth. The USB interface is mainly
for configuration, monitoring, and supplying power. With Bluetooth V2.1+EDR function built-in, S100 can
be used as external Bluetooth RTK receiver for Android Mobile Device to provide higher accuracy
positioning than internal GPS.
1-2 RTK Operation Guideline
To provide centimeter-level RTK accuracy, S100 requires much better operating condition than
conventional meter-level accuracy GPS receiver:
Baseline distance between base and rover should be under 30Km.
Open sky environment without interference and signal blockage
Received signal level should be no less than 40dB/Hz.
10 or more satellites with elevation angles over 15 degrees
Good satellite geometry with satellites spread over four quadrants of the sky.
5
1-3 S100 RTK Receiver Features
Base or Rover Mode Configurable Using Polaris Connect App
Supports GPS/QZSS L1/L2C, Beidou B1I/B2I, Galileo E1/E5b, GLONASS L1/L2 RTK Operation
Supports USB and Bluetooth V2.1+EDR Interface
On-Board 256MByte Flash Memory for Data Logging Post Processing
RTK Position Horizontal Accuracy 7mm + 1ppm, Vertical Accuracy 14mm + 1ppm
Maximum RTK Update Rate 10Hz
Supports RTCM 3.x Messages
NMEA Output
Update Rates:1 / 2 / 4 / 5 / 8 / 10 Hz for RMC / GGA / VTG / PSTI-030
Messages:GGA / GLL / GSA / GSV / RMC / VTG / ZDA / PSTI
Baud Rate
Bluetooth:115200
USB:4800 / 9600 / 19200 / 38400 / 57600 / 115200, default 115200
Power Consumption
280 mA @ 5V
Weight:460 g

6
2 USB Interface
a b
c d
Figure 2-1
Connect S100’s 4-pin socket (Figure 2-1 a) with the included accessory USB cable (Figure 2-1 b). The S100
USB cable is used for
1. Supplying power from power bank (Figure 2-1 d)
2. Firmware update using Windows PC (Figure 2-1 c)
7
3 Preparing for First-Time Use
A tutorial video showing the process of setting up S100 to perform RTK surveying with Mobile
Topographer from very beginning can be found here
https://www.youtube.com/watch?v=6FXFHmiqboE
3-1 Install “Polaris Connect” App
Install Android app “Polaris Connect for S100 RTK Receiver” from Google Play. It can be found with this
QR Code.
3-2 Install USB Driver
USB driver needs to be installed before updating S100 Receiver firmware. Download it from:
https://www.silabs.com/developers/usb-to-uart-bridge-vcp-drivers
3-3 Check S100 Receives Satellite Signal
Below steps bring up S100 as a normal USB-interface GNSS receiver to receive satellite signal:
1. Place S100 at a location having good sky view. Connect S100 with PC using the included USB cable.
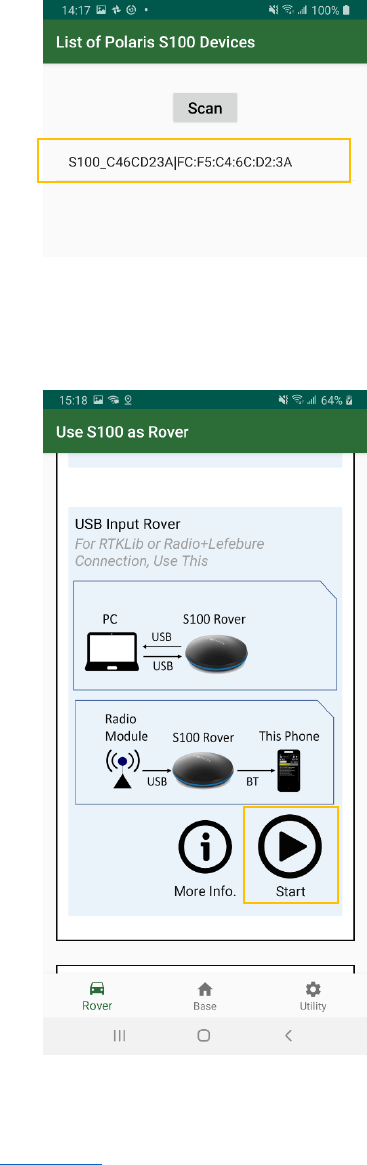
2. Pair phone with the S100, which has a Bluetooth device name starting with “S100”. See Figure 3-1.
Figure 3-1
8
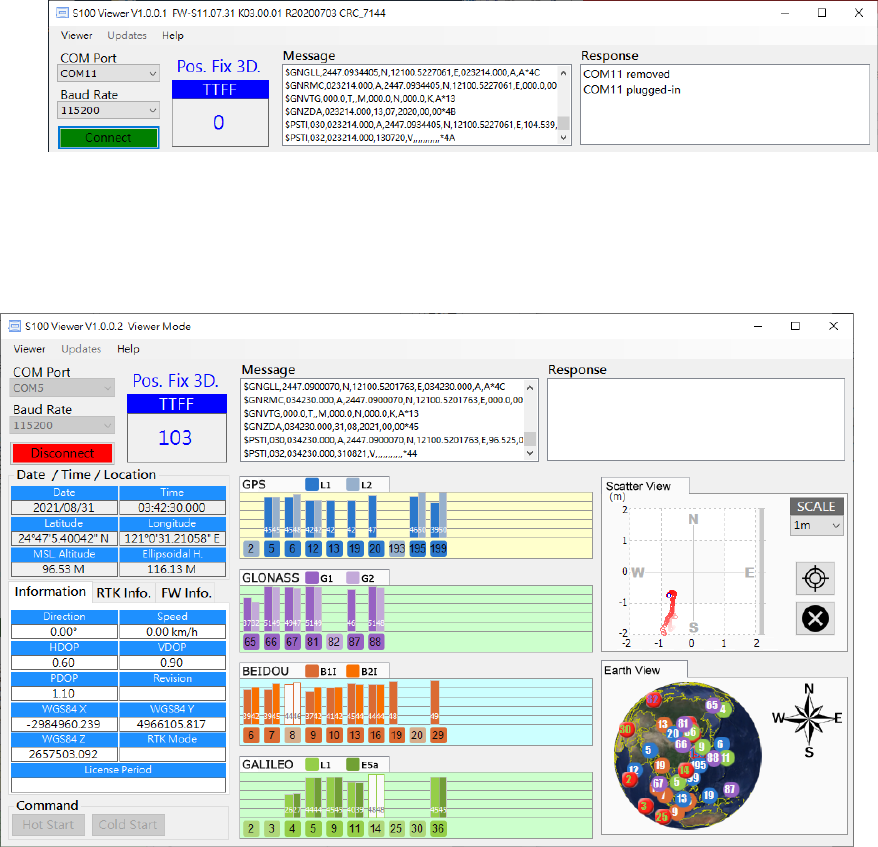
3. Launch Android app “Polaris Connect”, and selected the paired S100 device. See Figure 3-2.
Figure 3-2
4. Start “USB Input Rover” mode. The app closes when S100 is configured to USB Rover. See Figure 3-3.
Figure 3-3
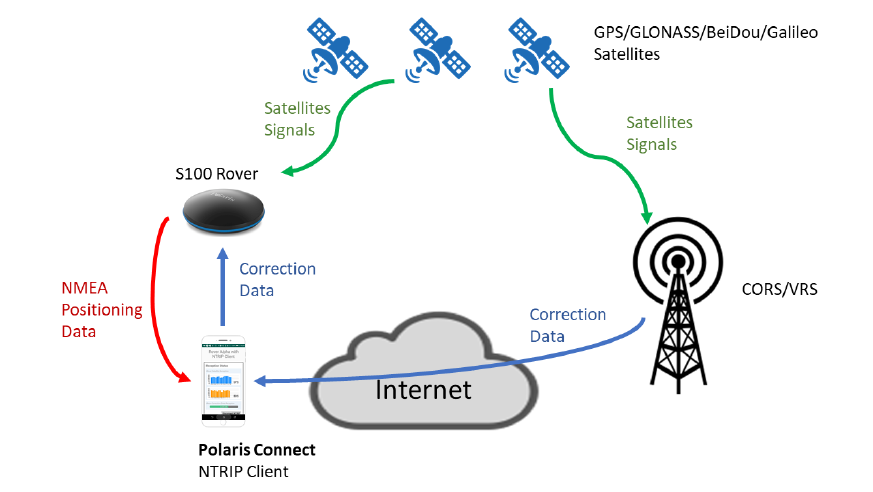
5. On a PC, install and open S100 Viewer. In S100 Viewer, a dialog box for COM port and baud rate will
appear. Click “Connect”. See Figure 3-4.
9
Figure 3-4
6. NMEA output should be seen on the Message screen. If having good sky view with sufficient number
of satellites tracked, the signal bar will turn solid and have position fix. See Figure 3-5.
Figure 3-5
10
4 RTK Rover Operation
S100 RTK rover works with carrier phase measurement, using fractional part of ~19 centimeter wave
length GNSS signals and differential principles to achieve centimeter-level position accuracy relative to
the RTK base.
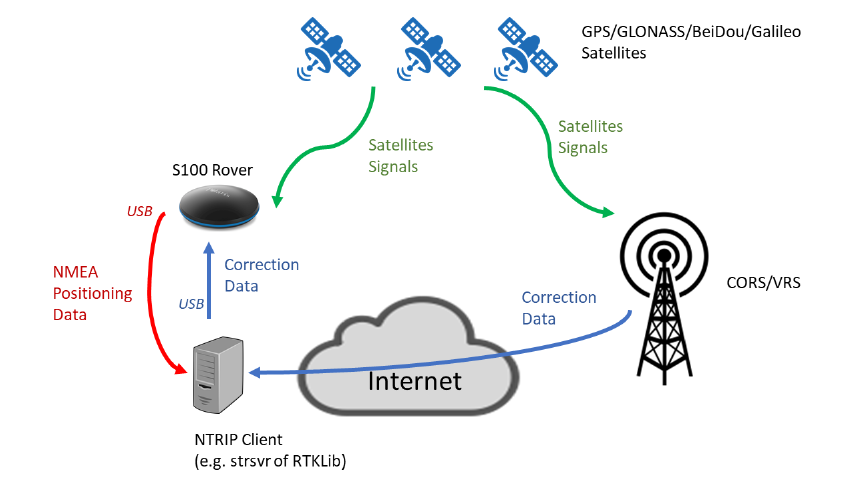
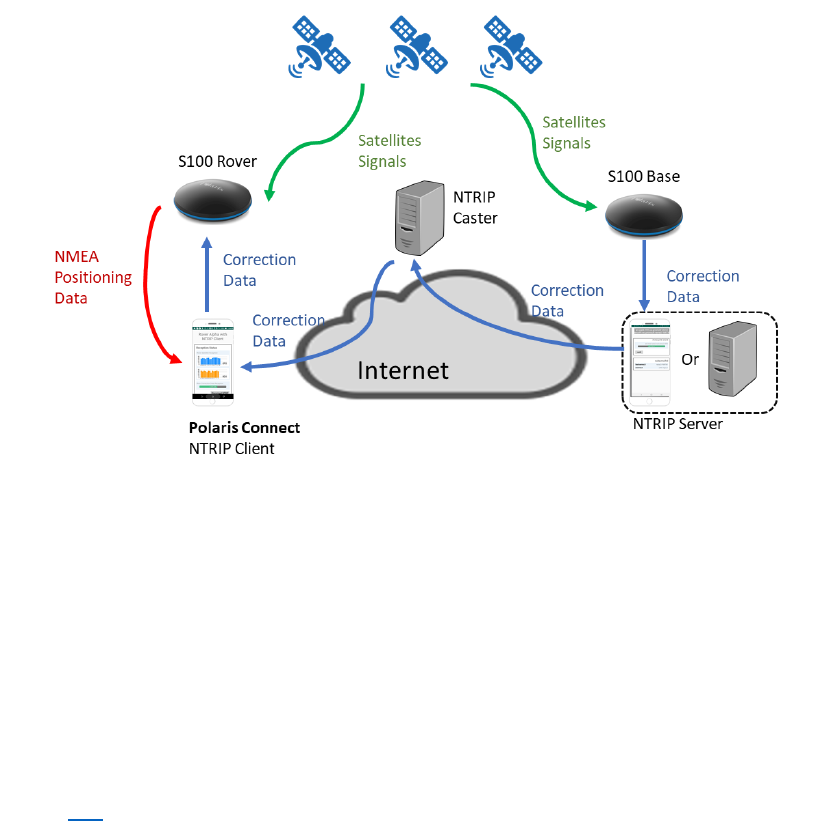
Referring to figure 4-1, S100 receives RTK base correction data over Internet via NTRIP Client running on
the Android phone. S100 uses this correction data along with signals received from satellites to calculate
its precise position and output position / velocity / time information in NMEA-0183 format.
Figure 4-1
The most common way to use S100 for RTK surveying is to adopt a 3
rd
party RTK correction service, then
only one S100 RTK receiver is needed.
S100 is configured as RTK rover and connects to an Android smartphone via Bluetooth. User can then run
the free “Polaris Connect” app, or “Lefebure NTRIP Client” app, on the smartphone for retrieving
3
rd
-party RTK base correction data over Internet and sending it to the S100 RTK receiver. With “MOCK
Location” option enabled on the Android smartphone, 3
rd
party GIS app for survey data collection can
be used, achieving centimeter-level RTK accuracy.
The S100 can be used as Bluetooth RTK rover or USB RTK rover. The operations to configure and start RTK
rover are described in this section.
For Bluetooth RTK rover, user can choose to use Polaris Connect app’s built-in NTRIP client feature
(section 4-1) or third-party NTRIP client like Lefebure NTRIP Client app (section 4-2).
For USB RTK rover, the operations are described in section 4-3..
Other possible but less used RTK usage scenarios are described in Appendix A-1.
11
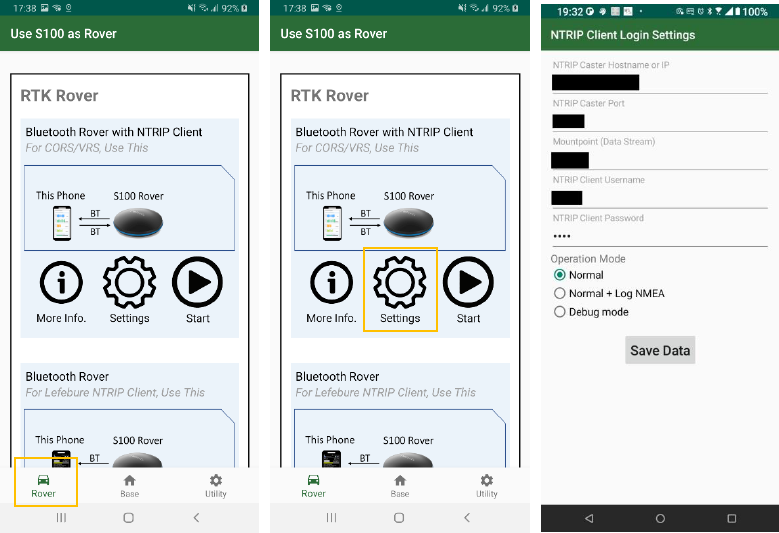
4-1 Bluetooth RTK Rover to Work with App-Built-In NTRIP Client
The S100 RTK Receiver, when configured as a Bluetooth RTK Rover, can receive RTK correction data from
RTK correction service, going through Polaris Connect app, as previously shown in Figure 4-1.
Follow below steps to configure S100 to receive correction data via Bluetooth interface with built-in
NTRIP client of the Polaris Connect app.
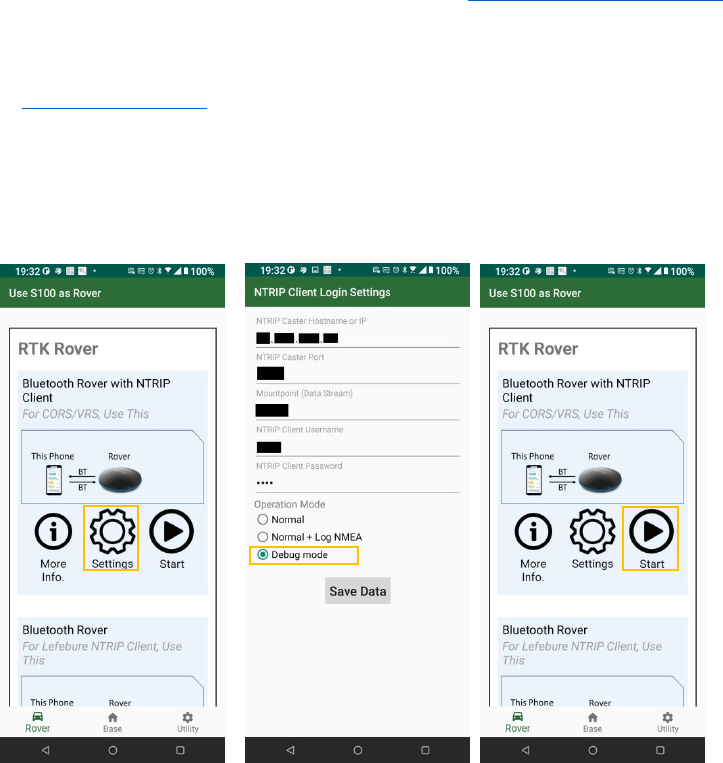
1. Switch to Rover tab in the app. See Figure 4-2 a
2. Click Settings (Figure 4-2 b) and configure NTRIP log-in information (Figure 4-2 c). The log-in
information should be obtained from RTK correction service provider.
3. Select Normal in Operation Mode, Normal + Log NMEA and Debug Mode are used for
troubleshooting, refer to Appendix A-3.
a b c
Figure 4-2

12
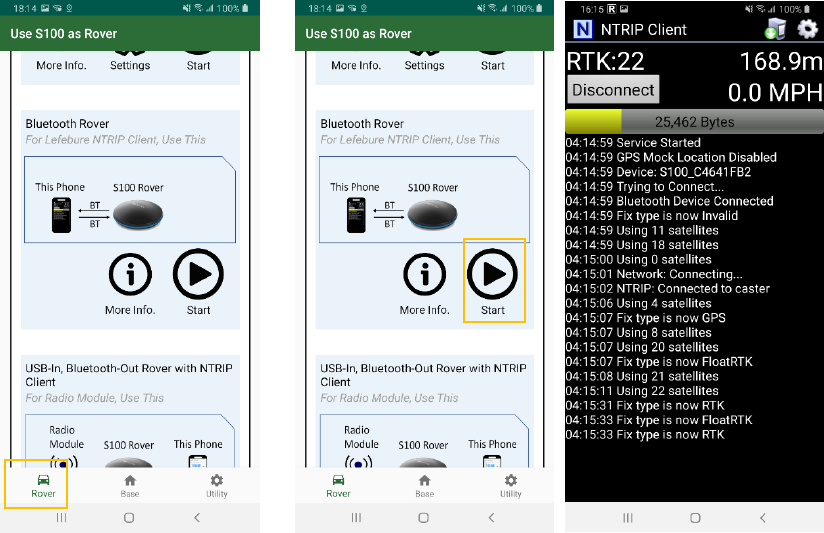
4. Click Start of “Bluetooth Rover with NTRIP Client” and then app starts receiving correction data. See
Figure 4-3 a b.
a b
Figure 4-3
4-2 Bluetooth Rover to Work with Third-party NTRIP Client App
The S100 RTK Receiver, when configured as a Bluetooth RTK Rover, can receive RTK correction data from
RTK correction service, going through a third-party NTRIP client service, e.g. Lefebure NTRIP Client app,
as shown in Figure 4-4.
Figure 4-4
13
Follow below steps to configure S100 to receive correction data from third-party NTRIP client app like
Lefebure NTRIP Client, via Bluetooth. The Polaris Connect app closes as soon as the S100 starts to work
as Bluetooth RTK rover.
1. Switch to Rover tab in the app. See Figure 4-5 a
2. Click Start of “Bluetooth Rover”; the app Polaris Connect will be closed. See Figure 4-5 b
3. Start third-party NTRIP client app to receive RTK correction data, sends it to S100, and receive
position data stream from S100. See Figure 4-5 c.
4. If needing more information on how to use Lefebure NTRIP client app, refer to Appendix A-2-4.
a b c
Figure 4-5
14
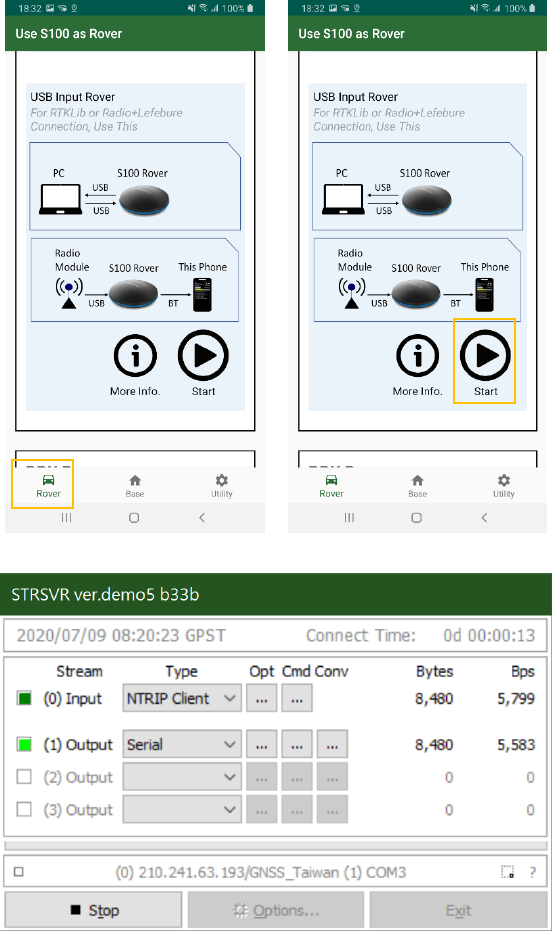
4-3 USB Rover
The S100 RTK Receiver, when configured as USB RTK Rover, can receive RTK correction data from NTRIP
client running on a PC, e.g. strsvr of RTKLIB, as shown in Figure 4-6.
Figure 4-6
15
Follow below steps to configure S100 to receive correction data via USB interface. The app closes when
the S100 starts to work as USB RTK rover.
1. Make sure S100 is connecting with PC via USB interface.
2. Switch to Rover tab in app. See Figure 4-7 a
3. Click Start of “USB Input Rover”; the Polaris Connect app will close. See Figure 4-7 b
4. Start third-party tool, e.g. strsvr of RTKLIB, to receive RTK correction data, sends it to S100, and
receive position data stream from S100. See Figure 4-7 c.
a b
c
Figure 4-7
5. COM port splitter program will be needed to enable another program to share the same COM port
to use the NMEA output.
16
5 Raw Measurement Recording and Post Processing
Raw measurement data logged on S100 RTK receiver is used for PPK and PPP processing. Sections 5-1
and 5-2 relate to these two types of post processing. How to obtain raw measurement data from S100 is
described in section 5-3.
5-1 Preparing for PPK
For Post-Processed Kinematic (PPK) calculations, both base data and rover data need to be available.
The base data can be (1) stored RTCM data received from RTK correction service or (2) stored RTCM data
received from another S100 RTK base; the rover data is the stored RTCM data from S100 RTK rover.
Refer to section 5-3 on how to log and obtain RTCM data on S100 receiver.
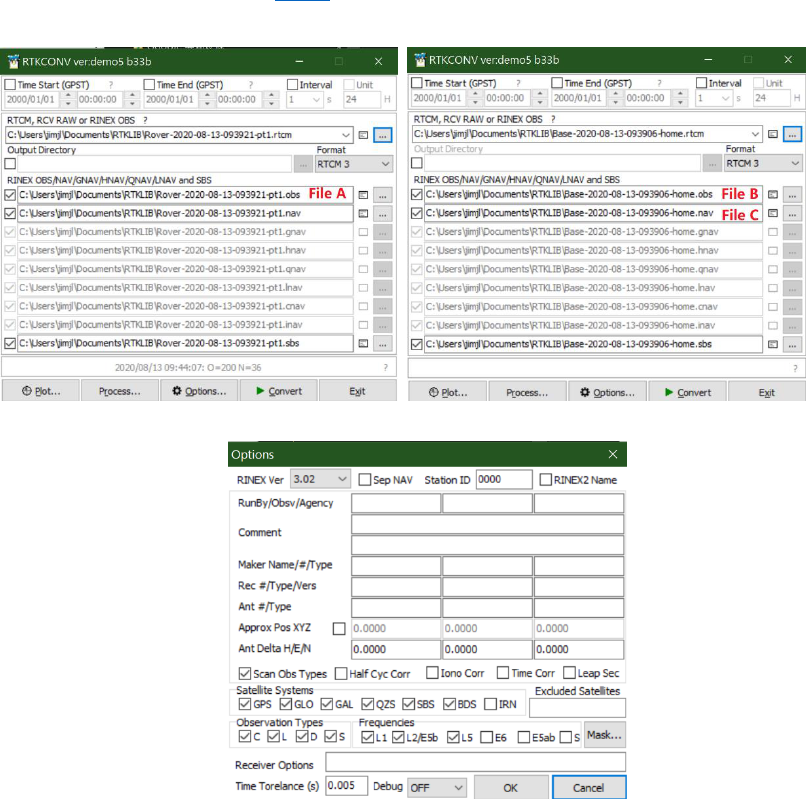
To perform PPK, files in standard RINEX format are needed. The logged RTCM data can be converted to
RINEX formats (2.01 – 3.03) using RTKLIB’s RTKCONV program. See Figure 5-1 a, b.
For reference Options window of RTKCONV is shown in Figure 5-1 c.
a b
c
Figure 5-1
17
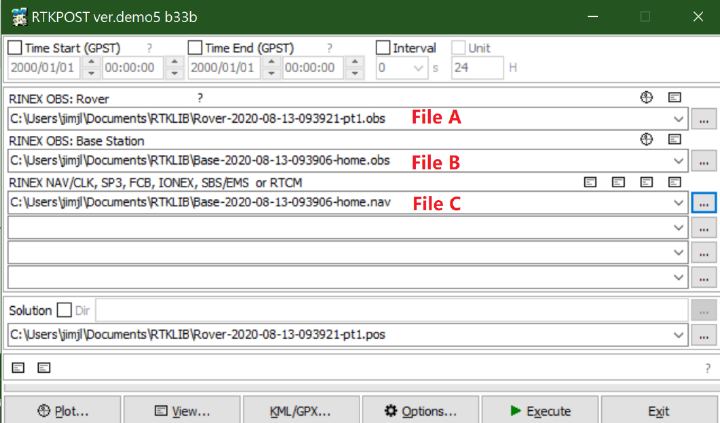
Converting the RTCM file with rtkconv.exe, user can get a RINEX file with extension “obs” and a RINEX file
with extension “nav”. The three files (two OBS files and either one of the two NAV files) are used in
RTKLib PPK tool “rtkpost.exe”. See Figure 5-2.
Figure 5-2
18
5-2 Preparing for PPP
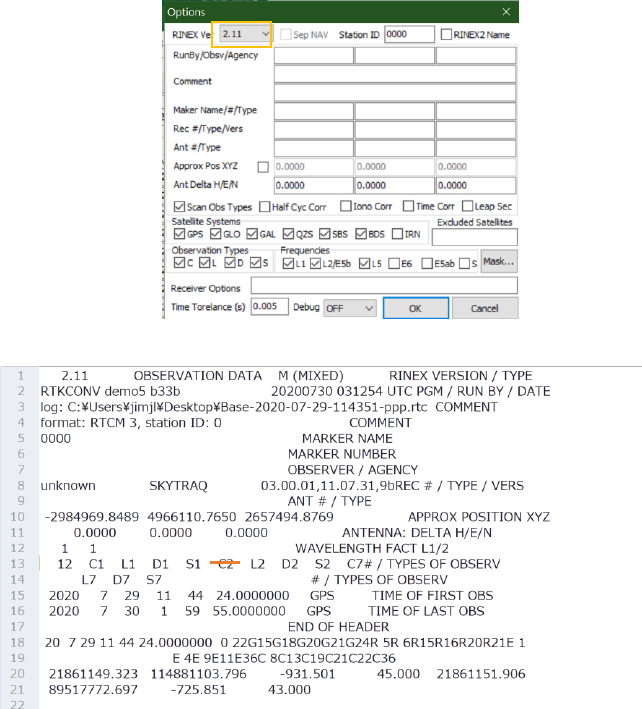
For some online Precise Point Positioning (PPP) service, older RINEX 2.11 format data is required; a minor
modification on converted RINEX file may be needed. Follow below steps to prepare RINEX file for
sending to online PPP service.
1. Log and obtain RTCM data (see section 5-3)
2. Use v.2.4.3 RTKLib’s RTKCONV program to convert the logged RTCM data to RINEX 2.11. Select
proper constellations and frequency bands the online PPP service uses; will then get a RINEX format
file *.obs. See Figure 5-3 a.
3. Edit the output *.obs file, and modify the string “C2” to “P2” on about 13
th
line. See Figure 5-3 b.
a
b
Figure 5-3
P2
19
5-3 Obtaining Log Data from S100
A tutorial video showing the process of downloading S100 log files can be found here:
https://youtu.be/YlYX_bUfmjM
The steps to generate, access, and manage log data with S100 are described below.
To generate log data of base and rover, follow below steps.
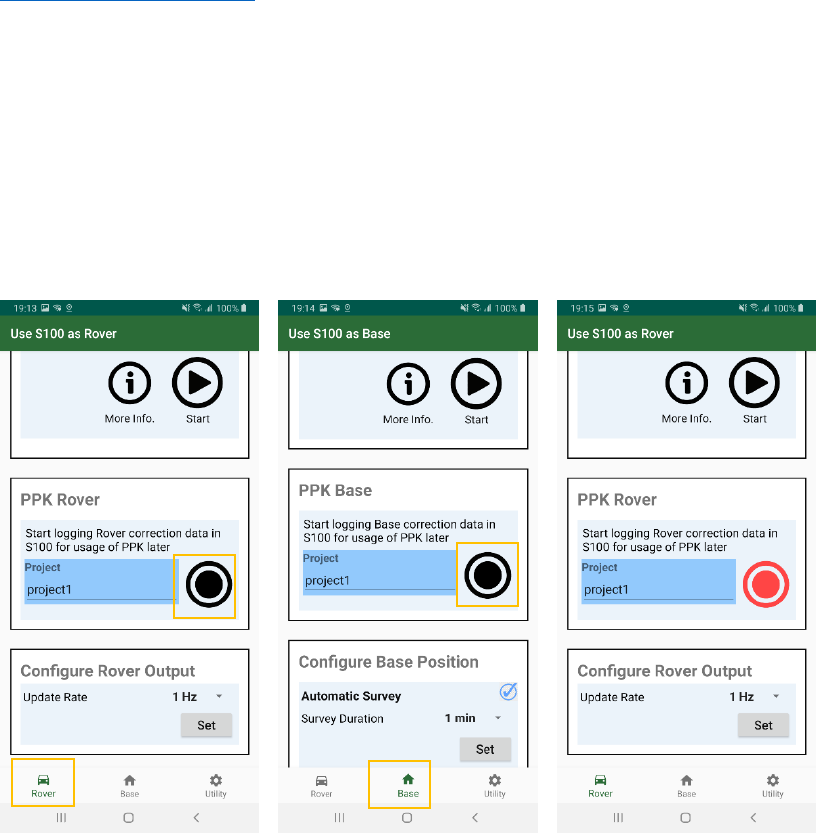
1. In rover or base tab, click the black REC button to start S100 to record raw measurement data in its
flash memory. See Figure 5-4 a, b.
2. When S100 start to record raw measurement data, the REC button becomes red and flicks. See
Figure 5-4 c.
3. Click red REC button again to stop recording.
a b c
Figure 5-4
20
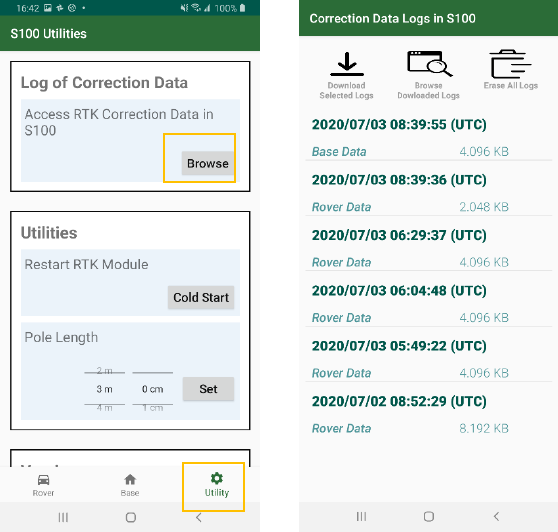
To check the log data in S100’s flash memory, follow below steps.
1. Click Utility and Browse. See Figure 7-5 a.
2. The information of recorded measurement data, including the start time, base or rover and file size,
is then displayed. See Figure 7-5 b.
a b
Figure 5-5
21
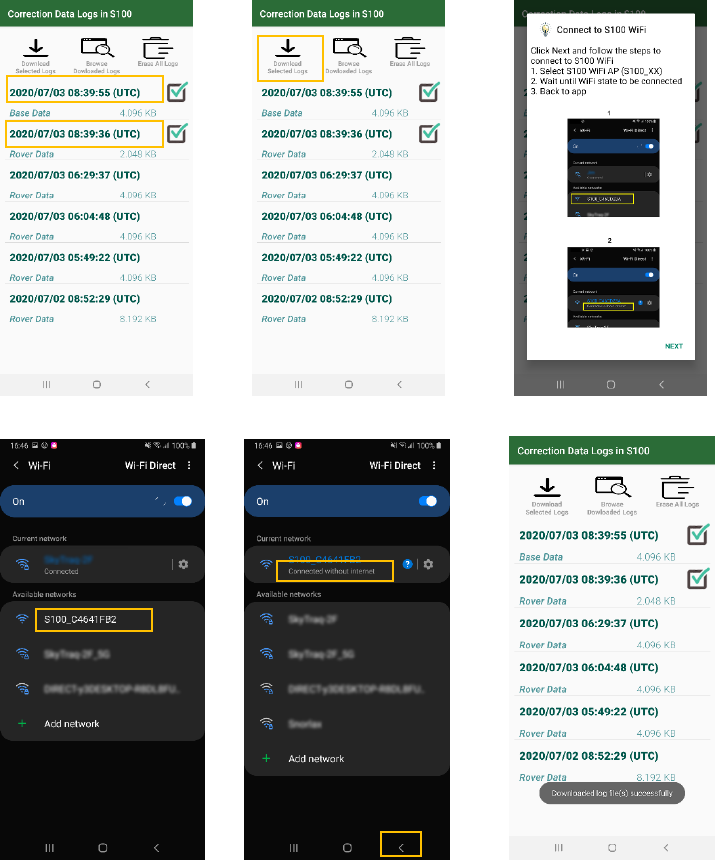
To download the log data to smartphone, follow below steps.
1. Select the log data to download by clicking its date field. The selected files are then marked. See
Figure 7-6 a.
2. Click “Download Selected Logs”. See Figure 7-6 b.
3. A pop-up window shows how to connect to S100 via WiFi connection. Read the instructions and click
Next. See Figure 7-6 c.
4. You’ll be brought to system’s WiFi configuration screen. Select the WiFi AP whose name starts with
“S100” and make sure the phone is connected with it (no Internet capability during log file transfer).
See Figure 7-6 d.
5. Click Back button. See Figure 7-6 e.
6. The file transfer starts, and you will be prompted when it finishes. See Figure 7-6 f.
a b c
d e f
Figure 5-6
22
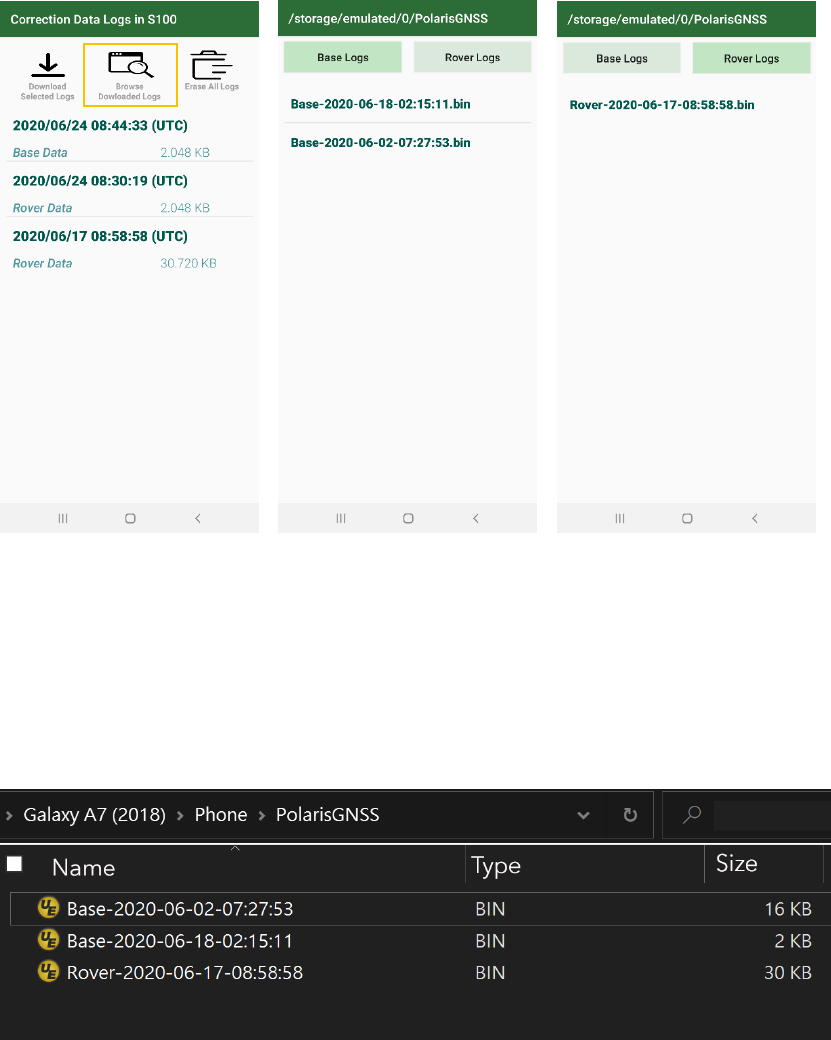
To check the downloaded log data on smartphone’s memory, follow below steps.
1. Click “Browse Downloaded Logs”. See Figure 7-7 a.
2. The downloaded raw measurement base data is then displayed. See Figure 7-7 b.
3. Click “Rover Logs” to check rover raw measurement data. See Figure 7-7 c.
a b c
Figure 5-7
To access the raw measurement data from PC, follow below steps.
1. Connect the phone with PC, then select the folder “PolarisGNSS” in the popped-out File Explorer. See
Figure 7-8
2. Copy/Move/Delete operation can be performed on the measurement data.
Figure 5-8
23
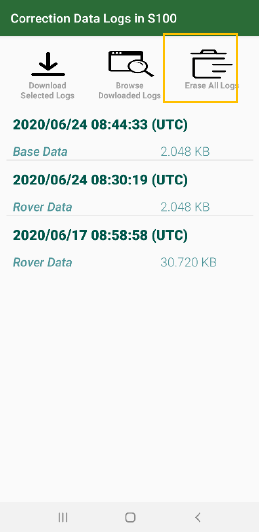
To erase all the recorded raw measurement data on S100, follow below steps.
1. Click “Erase All Logs”. See Figure 7-9.
2. All log files will be eased.
Figure 5-9
24
6 Software and Firmware Update
S100 Viewer is a PC software for S100 RTK Receiver firmware update. It can be downloaded form
https://www.polaris-gnss.com/s100/s100-viewer.zip
Occasionally, for improved product performance and user experience, there may be updates for
1. S100 Viewer software
2. S100 RTK receiver firmware
3. S100 Bluetooth module firmware
User can manually check and update them using Polaris Connect app and S100 Viewer on computer
with Internet connection.
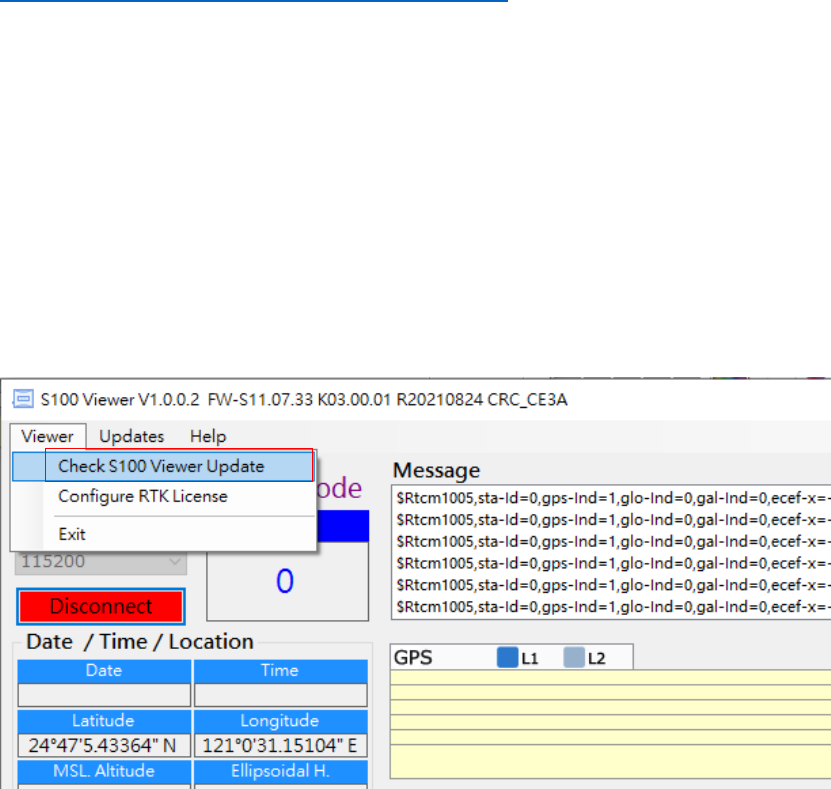
6-1 S100 Viewer Software Update
Select “Check S100 Viewer Update” from the Viewer pull-down menu and follow the instruction to
update S100 Viewer if an update is released.
Figure 6-1
25
6-2 S100 RTK Receiver Firmware Update
Videos showing procedure of updating S100 RTK Receiver firmware can be found here:
https://www.youtube.com/watch?v=WrAUKF84KZU(1/2)
https://www.youtube.com/watch?v=A3NPLYP_EKA(2/2)
Follow below steps to update S100 firmware.
1. USB driver needs to be installed for updating S100 receiver firmware. Download it from:
https://www.silabs.com/products/development-tools/software/usb-to-uart-b
ridge-vcp-drivers
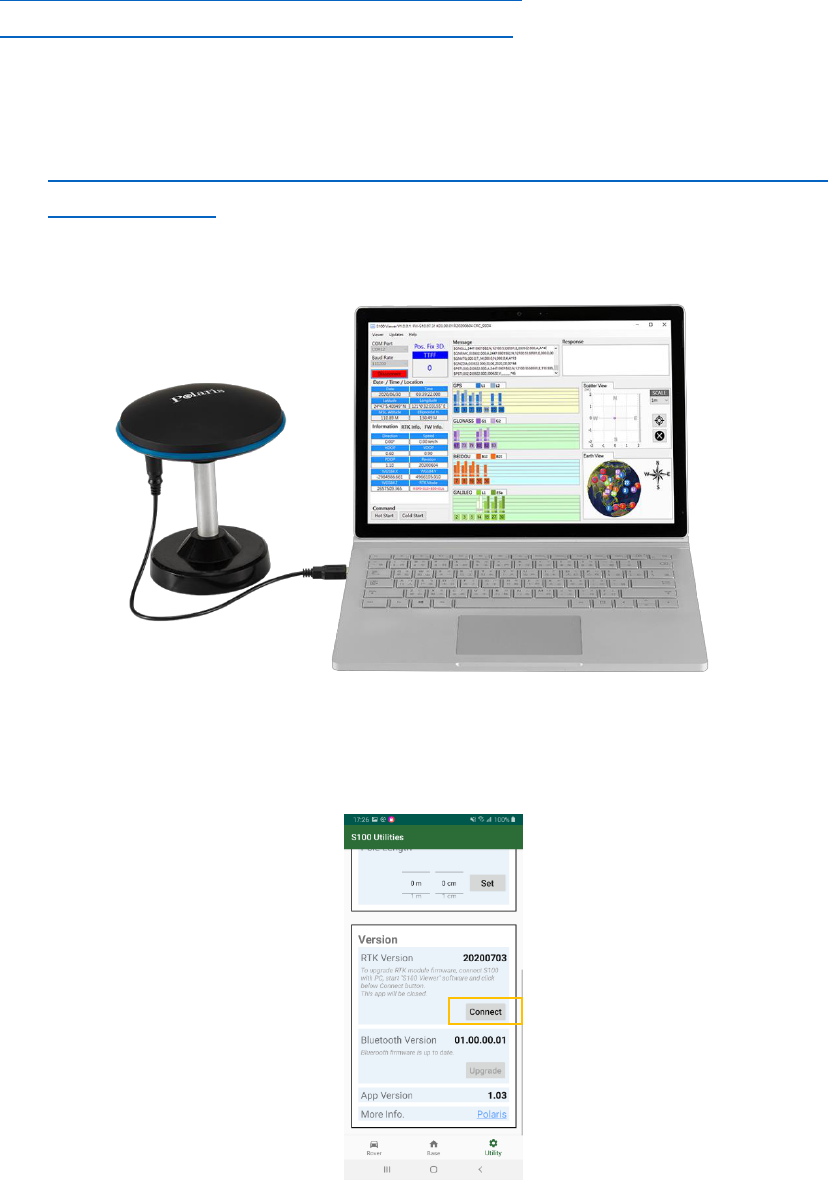
2 Connect S100 with PC and start S100 Viewer software on PC. See Figure 6-2.
Figure 6-2
3 On Polaris Connect app, click Connect button on Utility-Version screen, this enables S100 RTK
Receiver’s firmware to be updated. The app will then be closed. See Figure 6-3.
Figure 6-3
26
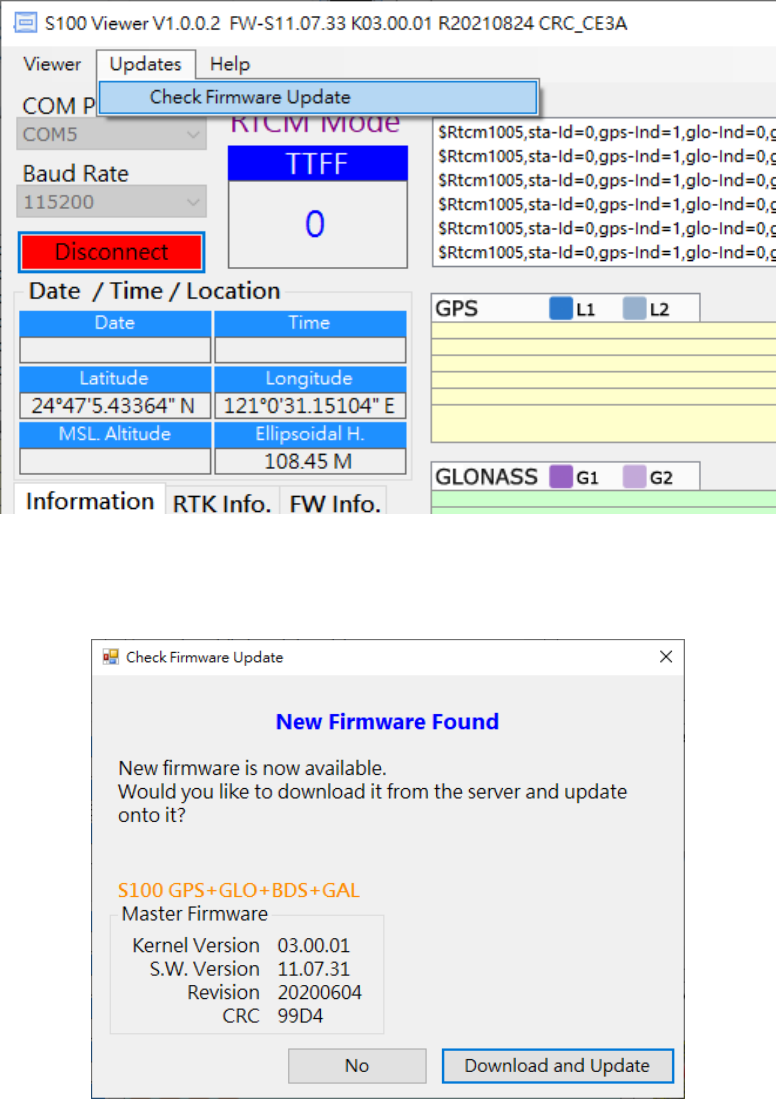
4 From S100 Viewer “Updates” pull-down menu, select “Check Firmware Update”, then a message
box showing “checking for updates” will pop up. See Figure 6-4.
Figure 6-4
5 In case new update software is found, a dialog box will appear. Press “Download and Update” to
update, or “No” to cancel update. See Figure 6-5.
Figure 6-5
27
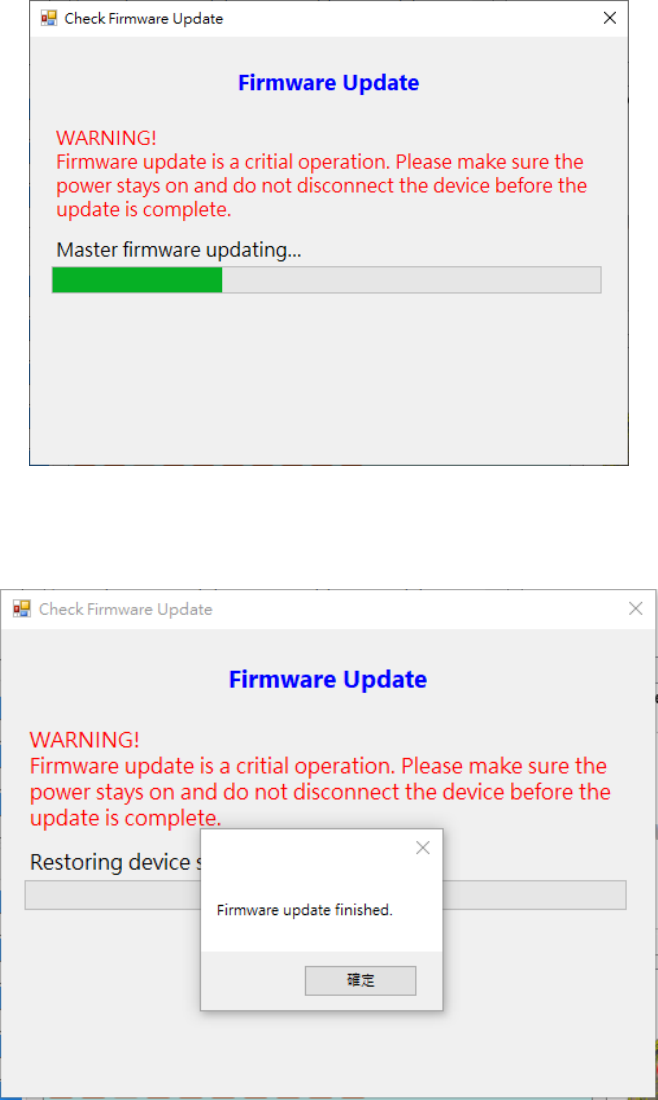
6 S100 Viewer will download the new firmware from Polaris’ server and load it to S100, with the
message box indicating software update status shown in Figure 6-6.
Figure 6-6
7 When software update is in progress, DO NOT remove the USB cable until software update is
completed. See Figure 6-7.
Figure 6-7
28
6-3 S100 Bluetooth Module Firmware Update
Bluetooth firmware is upgraded via WiFi connection. Follow below steps to update S100’s Bluetooth
module firmware.
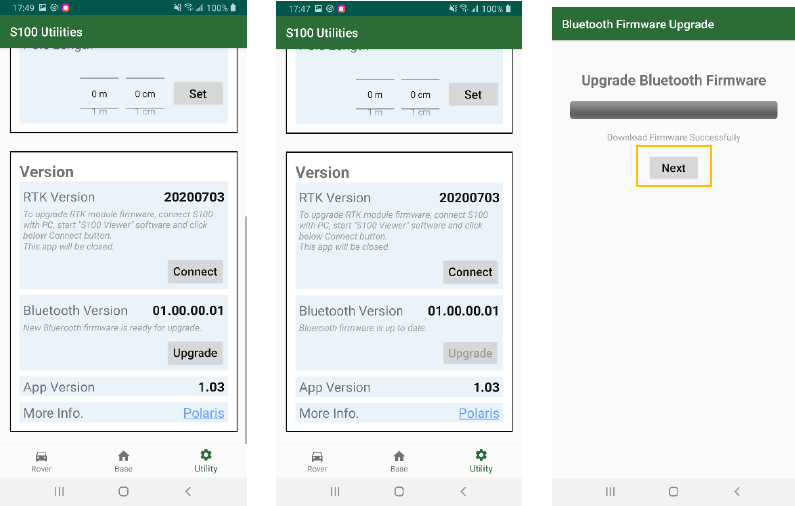
1. If a new version of Bluetooth firmware is available, the Upgrade button on Polaris Connect app’s
screen Utility-Version-Bluetooth Version becomes clickable (Figure 6-8 a), otherwise it is
unclickable (Figure 6-8 b).
2. Clicking Upgrade button leads to Bluetooth firmware download page. Once the Bluetooth
firmware is downloaded from server, a Next button appears. Click it to continue to do WiFi
connection. See Figure 6-8 c.
a b c
Figure 6-8

29
3. A pop-up window shows how to connect to S100 via WiFi connection. Read the instruction and
click Next. See Figure 6-9 a.
4. You are brought to system’s WiFi configuration screen. Select the WiFi AP whose name starts with
S100 and make sure the phone is connected with it (without internet). Click Back button. See
Figure 6-9 b c.
5. The Bluetooth firmware upgrade starts. You’ll be prompted when it is in progress and finishes.
See Figure 6-9 d e.
a b c
d e
Figure 6-9
30
7 Troubleshooting
Question #1: Why I’m unable to get RTK Fix when connecting to my local RTK correction service?
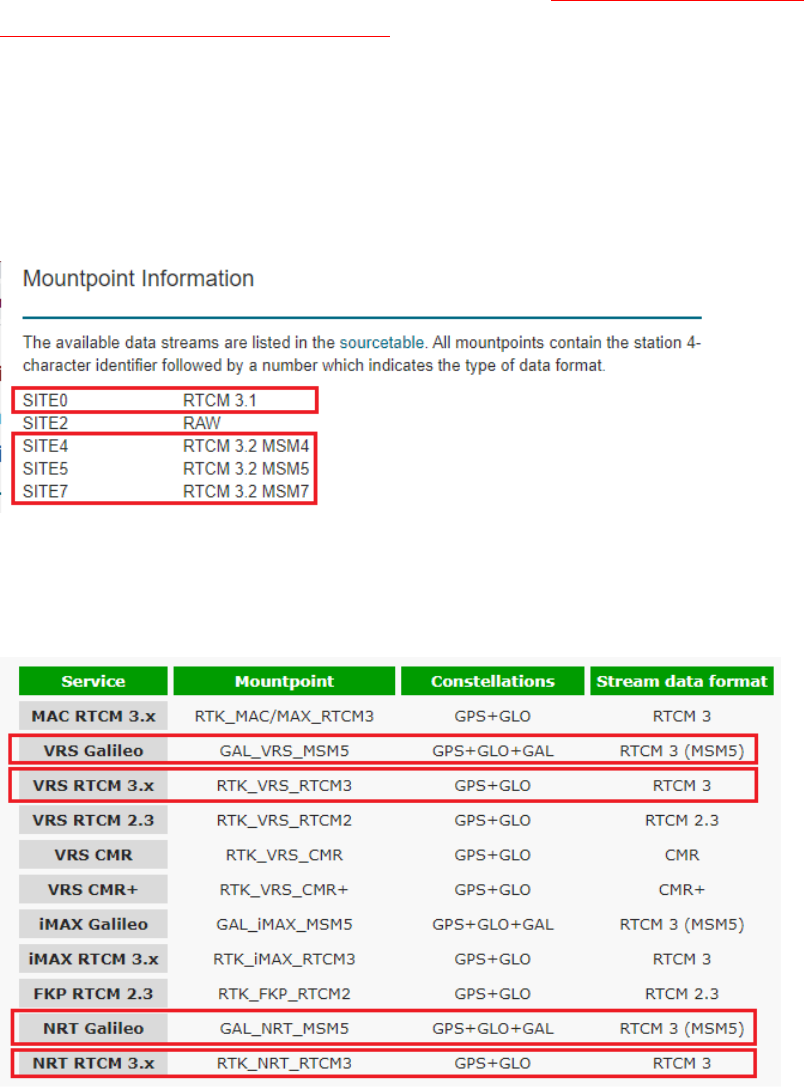
Answer #1: RTK correction service has several mountpoint options to select from, mountpoint with
compatible format need to be chosen to work correctly. The mountpoint to choose for S100 are
Virtual Reference Station VRS type, Nearest Station NRT type, or basic RTCM3.x type supporting 1004
/ 1012 sentence, or MSM4 / MSM5 / MSM6 / MSM7 messages, but non-FKP, non-MAC, non-MAX,
non-iMAX, non-SSR, non-CMR, non-CMR+ ones.
Supported MSM4 messages are 1074, 1084, 1094, 1124.
Supported MSM5 messages are 1075, 1085, 1095, 1125.
Supported MSM6 messages are 1076, 1086, 1096, 1126.
Supported MSM7 messages are 1077, 1087, 1097, 1127.
Example 1. Newer MSM4 / MSM5 / MSM7 formats are preferred over older RTCM 3.1 format.
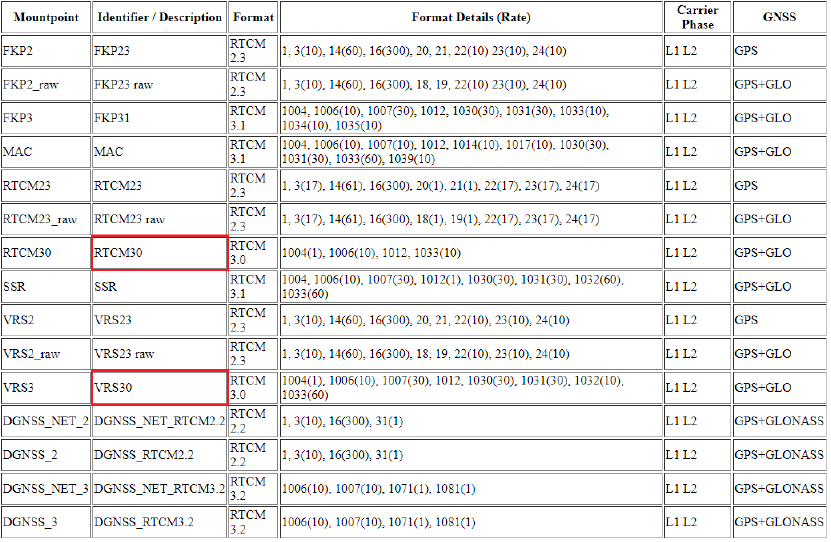
Example 2. VRS (Virtual Reference Station) type is preferred over NRT (closest physical base station)
type, as VRS has no operating range limit. S100 being GPS+GLO+GAL+BDS receiver, RTK base
supporting more satellite constellation (GPS+GLO+GAL) is preferred over one supporting lesser
satellite constellation (GPS+GLO).
31
Example 3. FKP, MAC, RTCM23, SSR, VRS23, RTCM2.2 ones are not to be used. RTCM 3.2 with 1071
GPS MSM1 and 1081 GLONASS MSM1 are of incompatible type, not be used.

32
Question #2: I’ve used correct mountpoint, but still unable to get RTK Fix, why?
Answer #2: RTK require strong signal to work. Make sure S100 is used outdoors under clear open sky
unblocked signal environment.
Although S100 is GPS/GLONASS/Galileo/Beidou quad-GNSS, only common set of satellite signals
tracked by both base and rover are used for RTK computation, thus when used with GPS/GLONASS
RTK base, effectively S100 is no different from GPS/GLONASS-only RTK receiver, and actual RTK used
satellite number will be less than total tracked satellite number.
On initial use, it’s good to choose time of day when there are more satellites overhead, avoid least
number of satellite situation, because if blocked by distant trees then actual usable satellites becomes
fewer, and it’ll be more difficult to get RTK Fix. https://www.gnssplanning.com/
RTK is susceptible to interference. Normally the signal should fluctuate not more than 1dB-Hz in short
period. If seeing signal fluctuating by several dB in short time, it means there is interference affecting
RTK operation. A different location or different time of day without interference affecting RTK
operation will get RTK Fix.
33
Appendix
A-1 More Usage Scenarios
A-1-1 Base-Rover RTK with PPP-Corrected Base
Figure A-1
In places without RTK base correction service but with cellular phone network, one can do RTK
surveying by setting up a mobile RTK base with initial approximate base position coordinates, later
upload base measurement data to online PPP service to get accurate base position coordinates, then
later correct rover collected data set by the offset determined from initial approximate base position
and PPP derived accurate base position.
A pair of S100 RTK receivers is needed to perform this operation as shown in Figure A-1.
See section A-2-1 and A-2-3 on setting up mobile Bluetooth RTK base.
See this blog on working with online PPP service.
The procedure steps to do this:
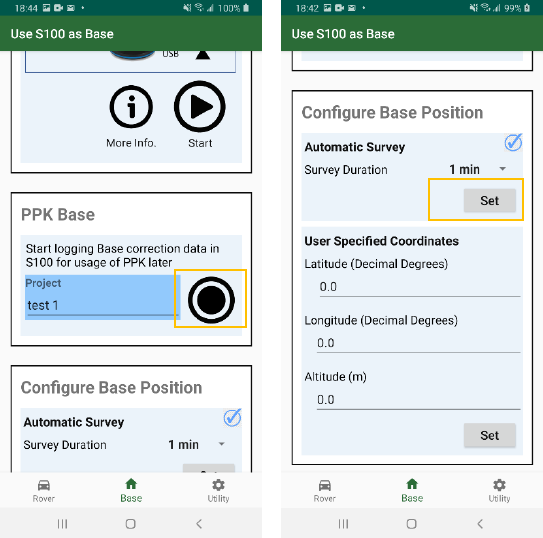
1. Setup mobile RTK base to log data for later uploading to online PPP service to derive accurate
base position. See Figure A-2 a.
2. Setup mobile RTK base to work with RTK rover, with base having approximate position P
0
. P
0
can
be 1 minute automatic surveyed approximate position. See Figure A-2 b.
3. Perform RTK surveying
4. After RTK surveying is completed, continue data logging if data logging time duration is still
insufficient.
34
5. Back in office, convert log file to RINEX format, and upload to online PPP service to obtain
accurate position coordinate P
1
of the mobile RTK base.
6. The offset delta between approximate base position P
0
and PPP-derived accurate position P
1
is
delta = P
0
– P
1
7. Subsequently correct all rover surveyed points by – delta, i.e. P’
M
= P
M
– delta
a b
Figure A-2
35
A-1-2 PPK with PPP-Derived Base
Figure A-3
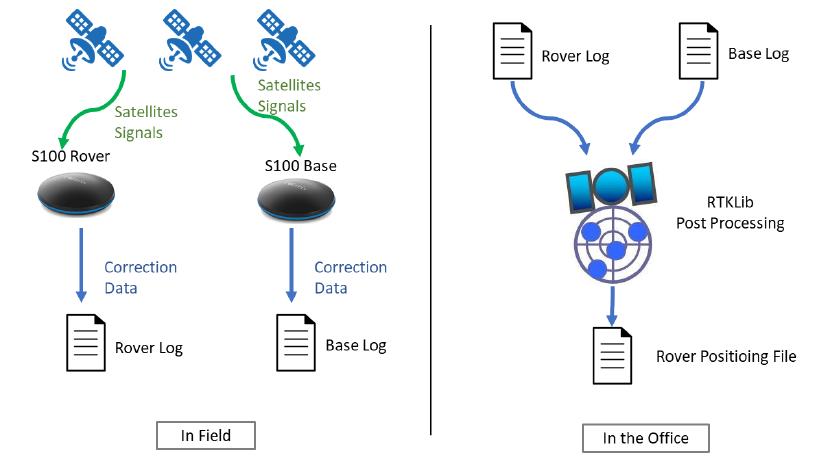
At places where there is no cellular phone network, PPK post-processing can be performed to derive
accurate position of the collected rover data logs.
A pair of S100 RTK receivers are needed to perform this operation as shown in Figure A-3.
The procedure steps to do this:
1. The base logs data for longer time period for online PPP processing to derive accurate base
position.
2. The rover logs data for a minute or two for each survey point.
3. Back in office, convert base log file to RINEX format, and upload to online PPP service to obtain
accurate position coordinate P
1
of the mobile RTK base.
4. Use RTKLIB’s RTKPOST to post-process each rover log file against base log file, using P
1
as base
position, to derive accurate rover position. Do this for all survey point collected rover log files.
36
A-2 Other RTK Related Operations
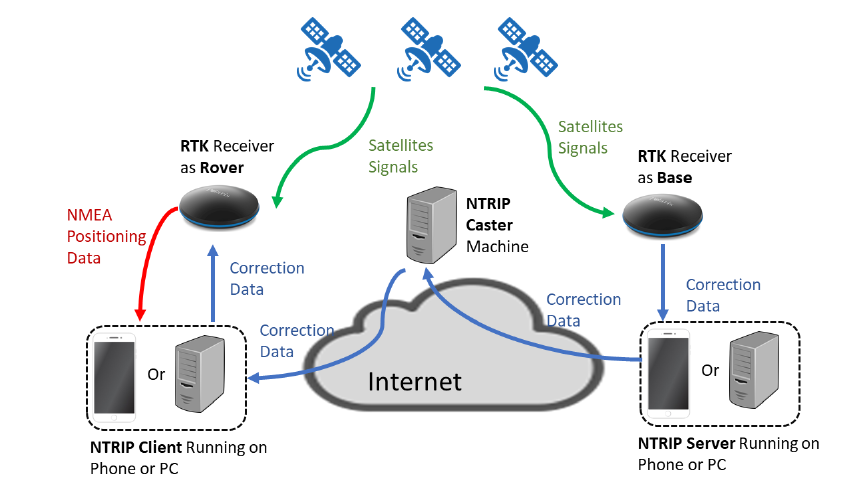
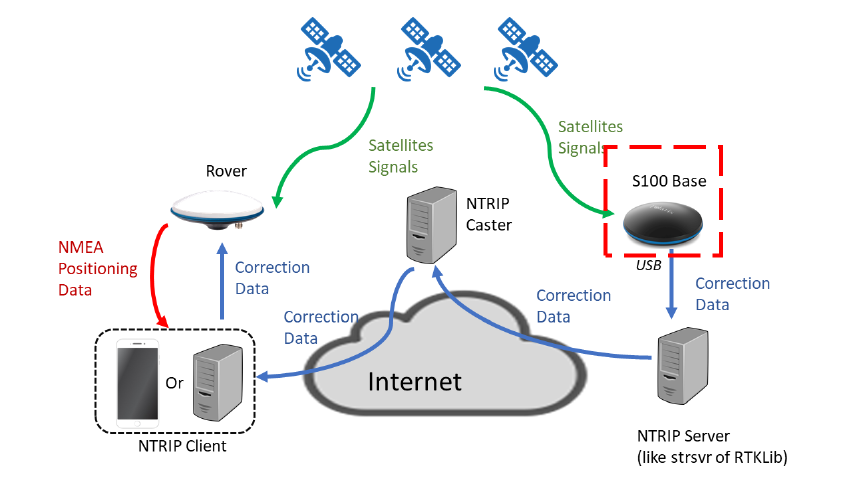
NTRIP is a protocol to deliver RTK correction data from RTK Base to RTK Rover, which is comprise of
three services (1) NTRIP Server (2) NTRIP Caster (3) NTRIP Client. The three services run on three
internet-enabled machines which are apart from one another in most cases. The general structure of
NTRIP can be illustrated in Figure A-4.
Figure A-4
Beside the RTK rover usage scenarios mentioned in section 4, user can also use S100 as a RTK base in
the following scenarios:
1. Use App-built-in NTRIP Server on phone (section A-2-1) or
2. Use strsvr of RTKLIB on PC (section A-2-2)
Setup of NTRIP Caster is described in section A-2-3.
Usage of Third-Party NTRIP Client App (Lefebure NTRIP Client) can be found in section A-2-4.

37
A-2-1 Bluetooth RTK Base with App-Built-in NTRIP Server
The S100 RTK Receiver, when configured as a Bluetooth RTK base, can output RTK correction data with
the NTRIP server built inside the “Polaris Connect” app, as shown in Figure A-5.
Figure A-5
Follow below steps to configure S100 to send out RTK correction data via Bluetooth with built-in
NTRIP server.
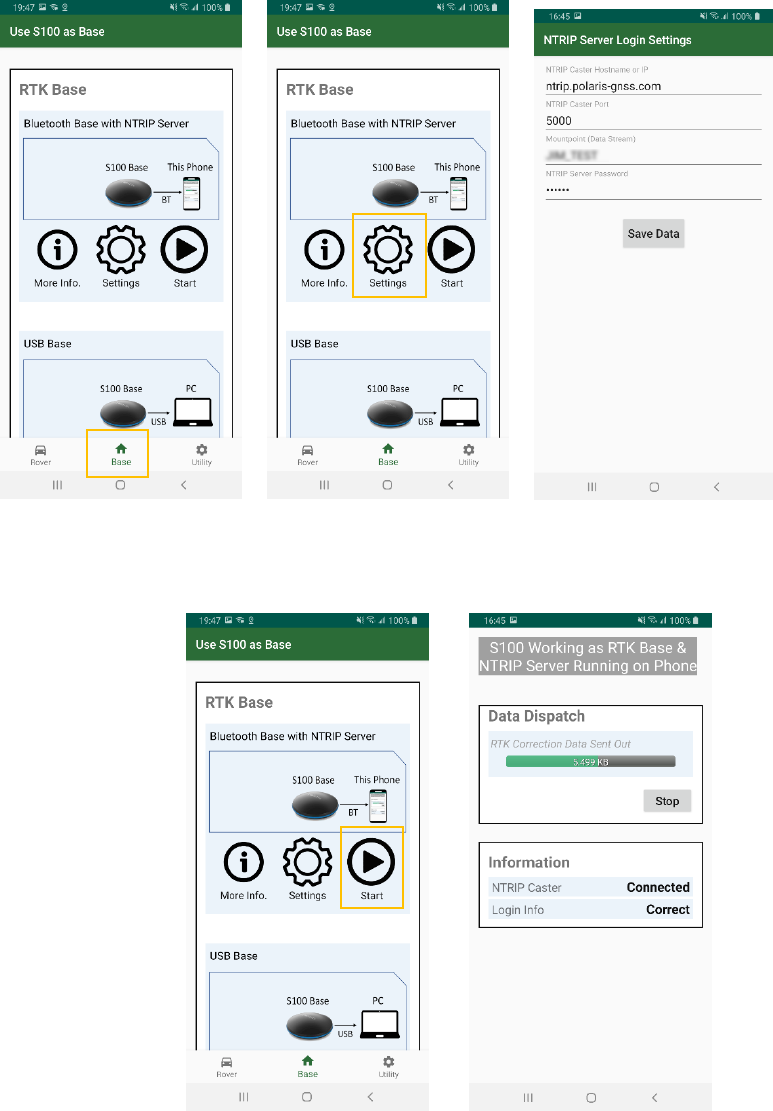
1. Click Base tab. See Figure A-6 a
2. Click Settings (Figure A-6 b) and configure NTRIP log-in information (Figure A-6 c).
3. Click Start of “Bluetooth Base with NTRIP Server”. See Figure A-7 a.
4. The NTRIP server starts. See Figure A-7 b.
38
a b c
Figure A-6
a b
Figure A-7
39
A-2-2 USB RTK Base
The S100 RTK Receiver, when configured as a USB RTK Base, can send out RTK correction data to a
connected PC’s NTRIP server software, e.g. strsvr of RTKLIB, as shown in Figure A-8.
Figure A-8
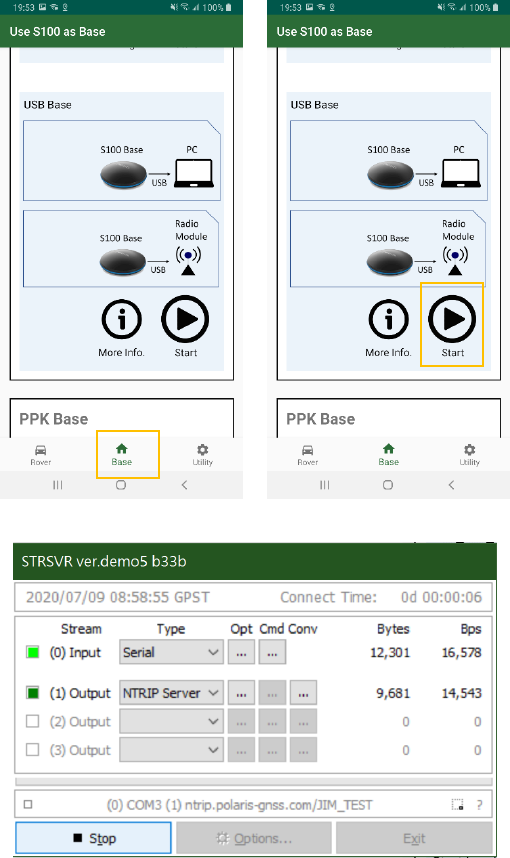
Follow below steps to configure S100 to send out RTK correction data via USB. The app closes when
S100 starts to work as USB RTK base.
1. Connect S100 with PC using the USB cable.
2. Click Base tab, select USB interface. See Figure A-9 a
3. Click Start of “USB Base”; the Polaris Connect app will close. See Figure A-9 b.
4. Start third-party NTRIP server tool, e.g. strsvr of RTKLIB, to send out RTK correction data. See
Figure A-9 c.
40
a b
c
Figure A-9
41
A-2-3 Setting Up NTRIP Caster
NTRIP requires a NTRIP Caster running on an Internet-connected computer with a fixed IP address so
that both NTRIP Server and NTRIP Client can connect with it, thus making correction data delivery
from NTRIP Server to NTRIP Client possible.
There are two ways to set up a NTRIP Caster.
1. The easiest method to set up a 24/7 running NTRIP Caster is subscribing to
SIX MONTH FLOATING IP RTK BASE REDIRECT SERVICE.
A subscriber will get NTRIP Caster login information: IP/port/mount point/user name/password,
and simply use it with “Polaris Connect” or “Lefebure NTRIP Client” app.
2. The other approach is to have an Internet connection with Fixed IP address to use with strsvr of
RTKLIB running on a PC.
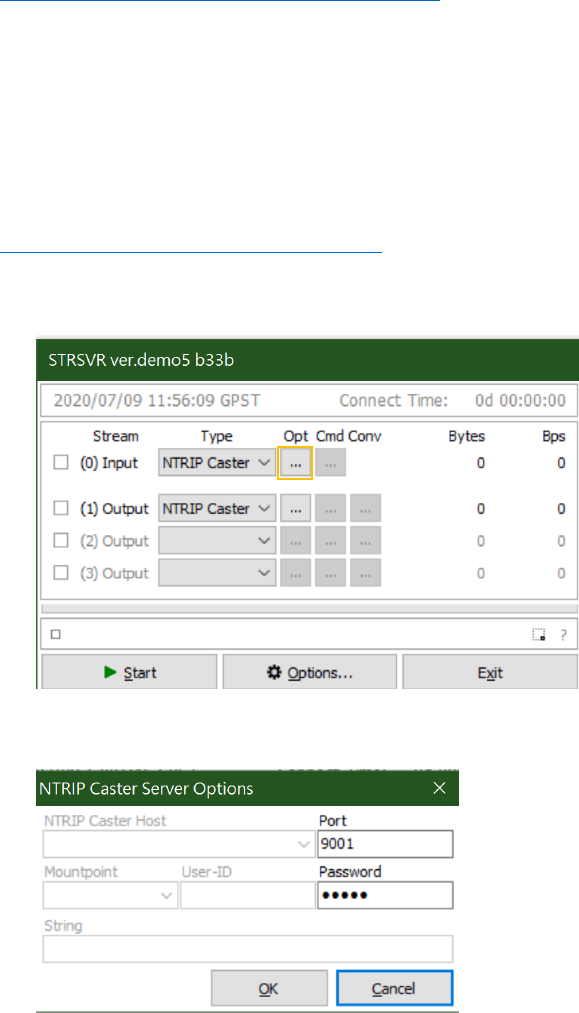
Follow below steps to set up an NTRIP Caster.
a. Get RTKLIB binary from
http://rtkexplorer.com/downloads/rtklib-code/
b. Run strsvr.exe
c. Configure Input Stream to be Type NTRIP Caster, and set up its options (by clicking Opt ).
d. Set input stream Port to be an available port number on this PC, 9001 for example. Set
Password to be your preferred NTRIP upload password. Then click OK.
42
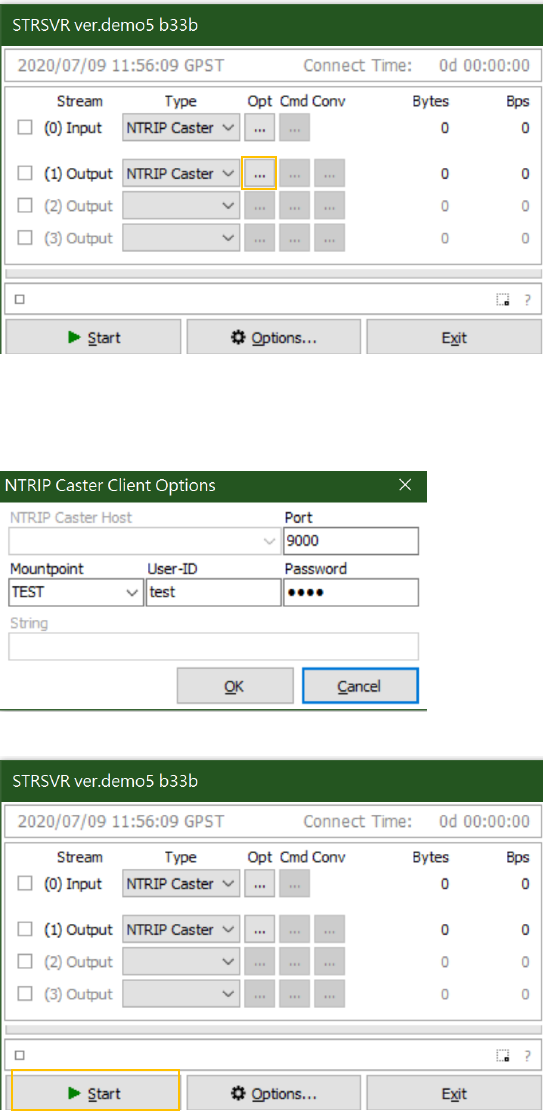
e. Continue to configure Output Stream.
f. Set output stream Port to be an available port number on this PC, 9000 for example (need to
be different from input stream port). Set Mountpoint/User-ID/Password to be your
preferred NTRIP download login information. Then click OK.
g. Click Start
43
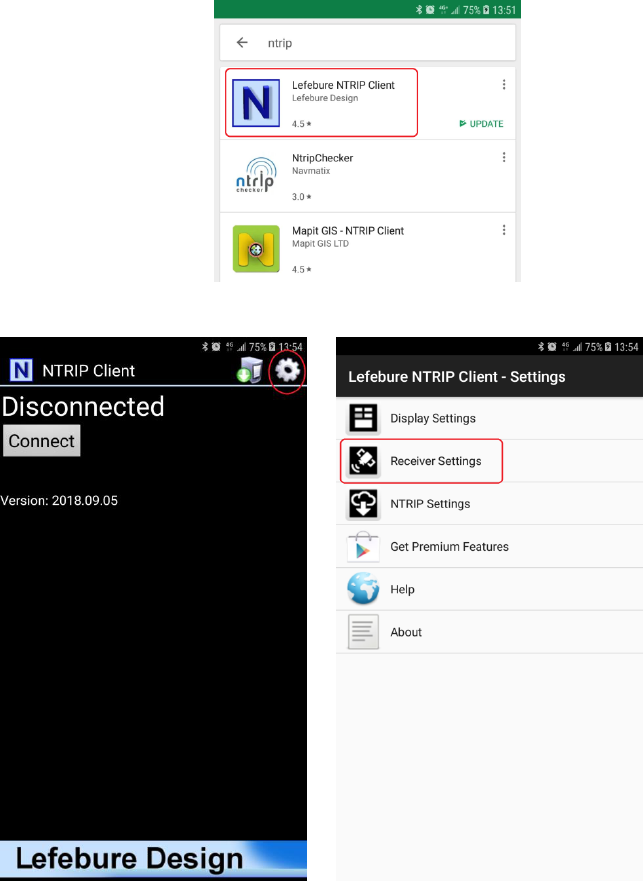
A-2-4 Third-Party NTRIP Client App Operations
Follow below steps to use Lefebure NTRIP Client app to send RTK correction data to S100.
1. Install Lefebure NTRIP Client from Google Play Store, open it.
2. Select the gear setup icon on the upper right corner. Select “Receiver Settings”.
44
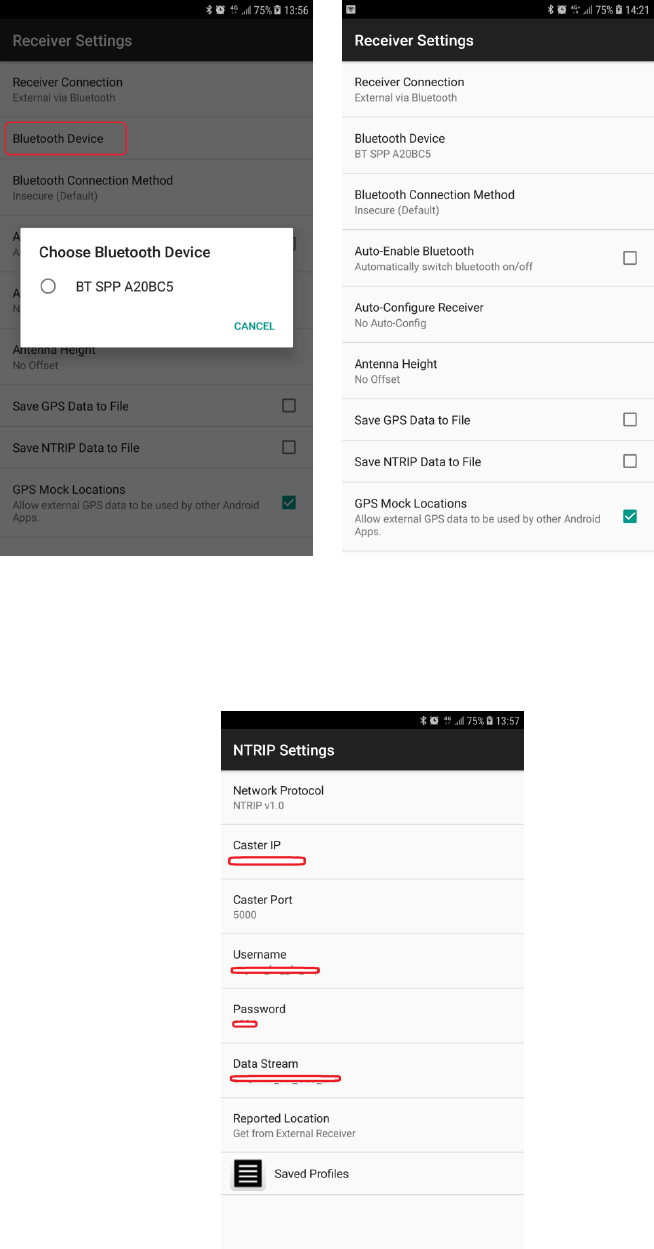
3. For “Receiver Connection” select “External via Bluetooth”. For “Bluetooth Device” select the “BT
SPP xxxxxx” device. Check “GPS Mock Locations”.
4. Select “NTRIP Settings”. Network Protocol select “NTRIP v1.0”. Enter base station and account
information for Caster IP / Caster Port / Username / Password / Data Stream. Report Location
select “Get From External Receiver”.
45
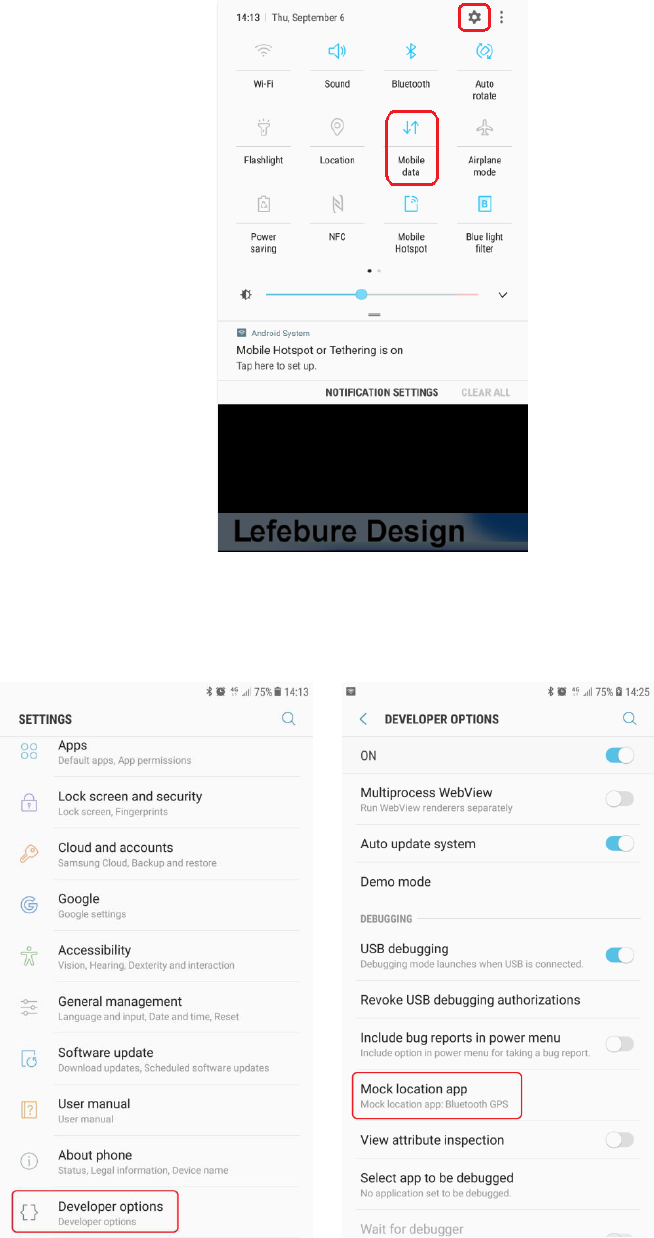
5. Enable phone’s Mobile Data connection. Select the gear icon on upper right to enter phone
Settings configuration page.
6. Select “Developer Options” near the bottom of Settings page. Sliding down Developer Options
page, select “Mock Location App”.
46
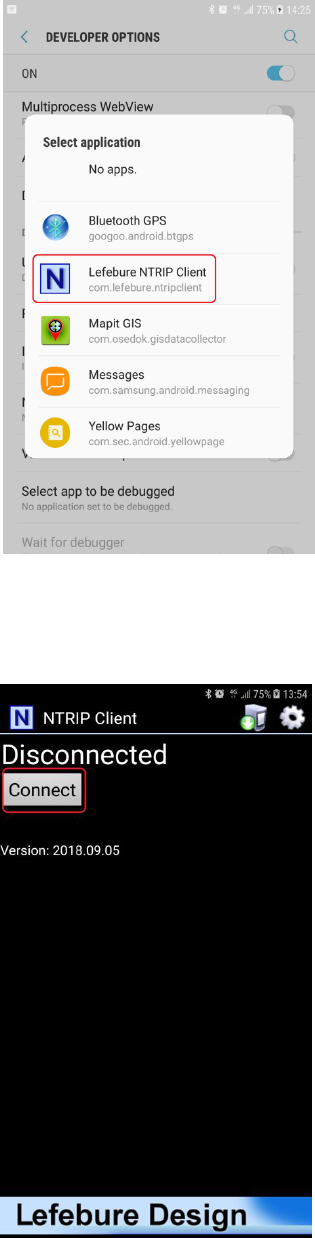
7. Select “Lefebure NTRIP Client”.
8. Return to Lefebure NTRIP Client App, click “Connect” to connect with S100 RTK receiver via
Bluetooth and RTK base station via Internet.
47
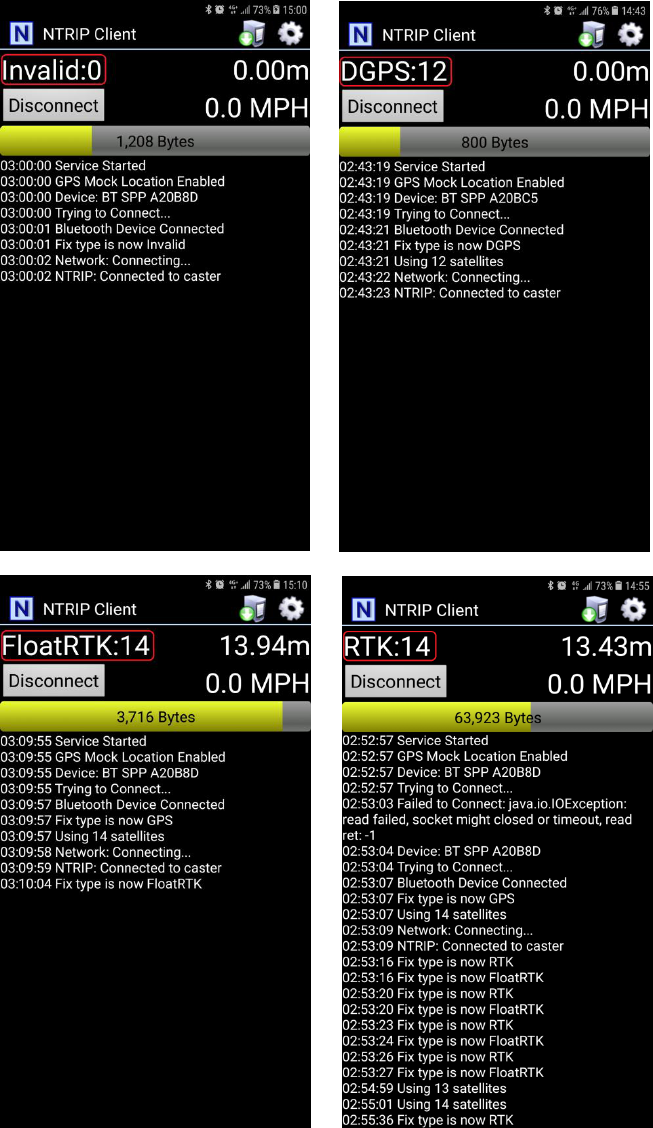
9. After connection is made, upper left screen will first show Invalid, denoting receiver does not
have position fix yet. Next it’ll show GPS or DGPS and number of satellites used, denoting
receiver has meter-level accuracy position fix. Then it’ll show FloatRTK for some time, denoting
the receiver is trying to converge to centimeter-level accuracy position. When the receiver has
centimeter-level accuracy position it’ll show steady RTK status. Afterwards third party Data
Collector Apps can next be used to record the position.
48
10. When surveying a group of locations within walking distance, can leave S100 powered up, taking
the range pole or tripod to next location to survey. Switch to the Lefebure NTRIP Client App to
check if S100 is in RTK Fix state before recording the next location position with Data Collector
App. The setup procedure only needs to be performed once. Later use only need to run
Lefebure NTRIP Client and connect.
49
A-3 Configure RTK License (for S100 Purchased After 2021.09.01)
The shipped S100 functions like a normal meter-level accuracy GNSS receiver prior to License
Activation purchase and RTK activation license is applied.
When License Activation is purchased, an email will be received by the customer requesting
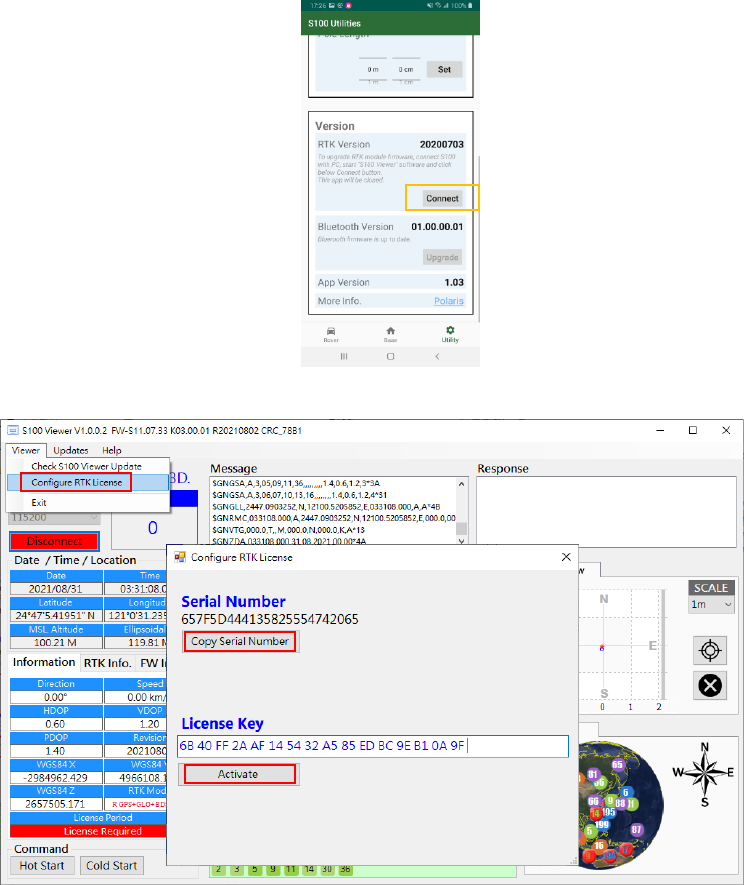
information on S100 Serial Number. On Polaris Connect App, click Connect button on Utility-Version
screen, this will allow S100 Viewer Windows program to read the S100 Serial Number. The App will
then close. See Figure A-3-1. To read the S100 Serial Number, from S100 Viewer’s Viewer pull-down
menu select “Configure RTK License”, click “Copy Serial Number” button, then paste it to the reply
email. Later when receiving License Key, simply copy and paste it to the License Key entry and click
“Activate”.
Figure A-3-1
Figure A-3-2
50
A-4 Problem Reporting
In the rare case that connection is made to 3rd party RTK base, but unable to get RTK Fix, only getting
RTK Float, follow the procedure steps shown in this video https://youtu.be/LG2qDGSrpYY to
simultaneously log 15 minutes of (1) RTK base RTCM data and (2) S100 raw measurement data for us
to analyze the issue. Upload the two log files to your Google Drive folder and send us a shareable link
to inf[email protected].
The steps are
1. Select Rover (bottom screen) -> Settings in Bluetooth Rover with NTRIP Client. See Figure A-11 a.
2. Select Debug Mode than press Save Data button. See Figure A-11 b.
3. Press Start. See Figure A-11 c.
a b c
Figure A-11
51
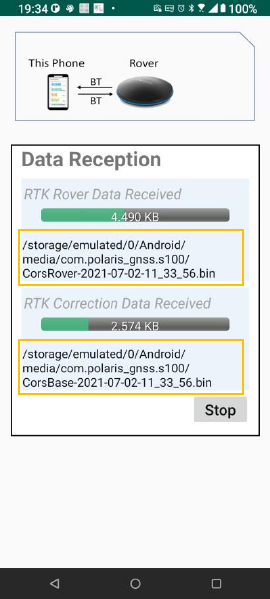
4. Wait 15 minutes, to log 15 minutes of data for analysis. The saved files can be found in
/Android/media/com.polaris_gnss.s100/ folder. See Figure A-12.
Figure A-12
52
The information provided is believed to be accurate and reliable. These materials are provided to customers and may be used for
informational purposes only. No responsibility is assumed for errors or omissions in these materials, or for its use. Changes to
specification can occur at any time without notice.
These materials are provides “as is” without warranty of any kind, either expressed or implied, relating to sale and/or use including
liability or warranties relating to fitness for a particular purpose, consequential or incidental damages, merchantability, or infringement of
any patent, copyright or other intellectual property right. No warrant on the accuracy or completeness of the information, text, graphics
or other items contained within these materials. No liability assumed for any special, indirect, incidental, or consequential damages,
including without limitation, lost revenues or lost profits, which may result from the use of these materials.
The product is not intended for use in medical, life-support devices, or applications involving potential risk of death, personal injury, or
severe property damage in case of failure of the product.
